Analitik Mekanik
18. yy. ve sonrasında geliştirilmiş, genellikle vektörel mekanik olarak nitelendirilen ve orijinalinde Newton mekaniği olarak bilinen analitik mekanik ( veya kuramsal mekanik ), klasik mekaniğin matematiksel fizik kaynaklarıdır. Model harekete göre analitik mekanik, Newton’un vektörel enerjisinin yerine, hareketin iki skaler özelliği olan kinetik enerjiyi ve potansiyel enerjiyi kullanır. Bir vektör, yön ve nicelik ile temsil edilirken bir skaler, nicelik ile( yoğunluğu belirtirken) temsil edilir. Özellikle Lagrange mekaniği ve Hamilton mekaniği gibi ( ikisi de birbirine sıkıca geçmiş alanlar) analitik mekanik de, sorunları çözmek için bir sistemin kısıtlamalarının ve tamamlayıcı yollarının kavramını kullanarak klasik mekaniğin kullanım alanını etkili bir şekilde yapılandırır. Schrödinger, Dirac, Heisenberg ve Feynman gibi kuram fizikçileri bu kavramları kullanarak kuantum fiziğini ve onun alt başlığı olan kuantum alan teorisini geliştirdiler. Uygulamalar ve eklemelerle, Einstein’a ait kaos teorisine ve izafiyet teorisine ulaşmışlardır. Analitik mekaniğin çok bilindik bir sonucu, modern teorik fiziğin çoğunu kaplayan Noether teoremidir.
Yapısal Hareket
- Genelleştirilmiş koordinatlar ve kısıtlamalar ( sabitler )
Newton mekaniğinde, biri alışıldığı üzere, hareket esnasında vücudun pozisyonuna göndermek için bütün Kartezyen koordinatların üçünü ya da diğer 3D koordinat sistemlerini kullanır. Ancak fiziksel sistemlerde, bazı yapılar ya da sistemler genellikle vücudun hareketini, belirli bir yönü ya da yolu tutmaktan alıkoyar. Bu yüzden Kartezyen koordinatının tamamına genelde ihtiyaç duyulmaz çünkü kısıtlamalar, koordinatlar arasındaki bağlantılara karşılık veren denklemler tarafından biçimlendirilebilir. Lagrange ve Hamilton biçimselciliğinde; kısıtlamalar, koordinat miktarını hareketi biçimlendirmek için ihtiyaç duyulan en az seviyeye düşüren hareketin geometrisine dahil edilir. Bunlar,qi (i = 1, 2, 3...) ile ifade edilen genelleştirilmiş koordinatlar olarak bilinir.
Eğrisel ve genelleştirilmiş koordinatlar arasındaki fark
Genelleştirilmiş koordinatlar, kısıtlamaları sistem üzerine dahil eder. Her bir qi bağımsızlık derecesi için ( i = 1, 2...N deliliyle tanımlanmış uygunluk için) her bir sistem kendi kurulumunu, biçimini değiştirebilir; eğrisel uzunluklar ya da açılar olarak. Genelleştirilmiş koordinatlar, eğrisel koordinatla aynı değildir. Genelleştirilmiş koordinatların sayısının bu boyuta eşit olmasına gerek yok iken, eğrisel koordinatların sayısı söz konusu pozisyon uzamının ( gerçel uzam ya da koordinat uzamı) boyutunu eşitler.( genellikle 3D uzam için 3). Kısıtlamalar, bağımsızlık derecesinin miktarını düşürebilir. Bu yüzden sistemin biçimini tanımlamak için genelleştirilmiş koordinatların sayısına ihtiyaç vardır. Sözü edilen genel kural:
- [pozisyon uzamının boyutu (genellikle 3)] × [sistemin bileşenlerinin sayısı ("parçacık")] − (kısıtlamaların sayısı)
- = (bağımsızlık derecesinin miktarı) = (genelleştirilmiş koordinatların sayısı)
N sayıda bağımsızlık derecesine sahip bir sistem için, genelleştirilmiş koordinatlar bir N-katında toplanabilir:

Ve bu katın zaman türevi ( burada üst nokta ile belirtilen) genelleştirilmiş hızı verir:
- .

- D’Alembert İlkesi
Konunun inşa edildiği zemin D’Alembert ilkesidir. Bu ilke, bir kuvvet tarafından yapılan infinitezimal ( sonsuz küçük) edimsiz iş sıfırdır der ki bu da sistem kısıtlamaları ile uyum içinde olan bir kuvvet tarafından yapılan iştir. Kısıtlama kanısı, sistemin yapabileceklerini sınırladığı ve sistemin hareketini çözmek için gerekli olan adımları sağladığı için yararlıdır. D’Ambert ilkesi için denklem şöyledir:

olmak üzere,

Bunlar genelleştirilmiş kuvvetlerdir ( burada normal Q yerine aşağıdaki kuralsal dönüşümlerle oluşabilecek çelişkiyi önlemek için el yazısı olan Q kullanılmıştır.) ve q lar genelleştirilmiş koordinalardır. Bu, analitik mekanik dilindeki Newton yasalarının genelleştirilmiş formunu oluşturur:

T sistemin toplam kinetik enerjisi olmak üzere,

formülü yararlı bir stenodur (formül için matrix hesabına bakınız).
Holonomik Kısıtlamalar
Eğer eğrisel koordinat sistemi, standart konum vektörü r ile tanımlanırsa ve q ( genelleştirilmiş koordinatlar) ile t zaman cinsinden yazılabiliyorsa:

ve bu ilişki her t için tutuyorsa, q Holonomik kısıtlama olarak adlandırılır. r vektörü, kısıtlamaların sadece q(t) yüzünden olmayıp t ile de farklılaştığı durumlarda açık bir şekilde t ye bağlıdır. Zamandan bağımsız durumlar için kısıtlamalar, skleronomik olarak da adlandırılır ve zamana bağlı durumlar için de reonomik olarak adlandırılır.
Lagrange Mekaniği
Genelleştirilmiş koordinatlara ve temel Lagrange mekaniğinin işlevine giriş:

T , toplam kinetik enerji olmak üzere ve V ise bütün sistemin toplam potansiyel enerjisi olmak üzere, Sonrasında değişimler hesabı takip edilerek ya da yukarıdaki formül kullanılarak Euler-Lagrange denklemlerine ulaşılır;

Bunlar N ikinci dereceden basit türevsel denklemler grubudur, hepsi birer adet qi(t) dir.
Bu formülleme; toplam enerjinin sabit olduğu ve geçiş süresinde hiçbir etkisi olmadığı düşünüldüğünde, hareketin takip ettiği asıl yolun üzerinde kinetik enerjinin zaman integralinin en az olduğu yolun seçimi olarak tanımlar.
Konfigürasyon uzayı
Lagrange formüllemesi sistemin konfigürasyon uzayını mümkün olan bütün genelleştirilmiş koordinatları kullanır:

N-boyutlu gerçel uzay olmak üzere, (ayrıca küme yapım formülüne bakınız).Euler-Lagrange denklemlerinin detaylı çözümü, yol (konfigürasyon) ya da yörünge olarak adlandırılır. Yani q(t) gerekli başlangıç kurallarına bağlıdır. Genel çözümler, bir takım mümkün konfigürasyonları zaman işlevleri olarak oluşturur:


Konfigürasyon uzayı, topolojik manifoltlar (çokkatmanlılar) ve tanjant demetleri açısından daha genel olarak hatta daha derinlemesine tanımlanabilir.
Hamilton Mekaniği
Hamiltonian ve Hamilton denklemleri
Lagrangian’ın Legendre dönüşümü, genelleiştirilmiş koordinatların ve hızın (q, q̇) ile (q, p) yerine geçer; genelleştirilmiş koordinatlar ve genelleştirilmiş momentumlar , genelleştirilmiş koordinatları birleştirir:

ve momentumlar ve genelleştirilmiş koordinatlar açısından Hamiltonan’ı tanımlar:

• skaler çarpım olmak üzere, ayrıca Hamilton’un denklemine götürür:

Bunlar bir grup 2N birinci dereceden basit türevsel denklemlerdir, birer adet qi(t) ve pi(t) dir. Legendre dönüşümünün bir diğer sonucu Lagrange’nin ve Hamilton’un zaman türevleri ile ilgilidir:

Bu sıklıkla diğerlerine ek olarak Hamilton’un hareket denklemlerinin biri olarak düşünülür. Genelleştirilmiş momentumlar, genelleştirilmiş kuvvetler bakımından Newton’un ikinci yasasıyla aynı yoldan yazılabilir:

Genelleştirilmiş momentum uzayı
Konfigürasyon uzamına benzeyen bütün momentumlar grubu momentum uzayı dır. ( teknik olarak bu bağlamda; genelleştirilmiş momentum uzayı):

momentum uzayı "k-uzayı"; olarak da adlandırılır yani kuantum mekaniğinde ve dalgalar teorisinde de kullanıldığı gibi, De Broglie ilişkileri tarafından verilen bütün dalga vektörleri grubu. Ancak bu kapsamda bundan bahsedilmemektedir.
Evre (zaman ya da faz) uzayı
Bütün pozisyonlar ve momentumlar evre uzayını oluşturur;

Yani genelleştirilmiş momentum uzayı ve konfigürasyon uzayının kartezyen çarpımı × .
Hamilton denklemlerinin detaylı çözümü evre yolu olarak adlandırılır, yani belirli bir eğri (q(t),p(t)) , gerekli başlangıç durumlarına bağlıdır. Bütün evre yolları türevsel denklemlerin genel çözümleri, evre dikeyleridir:

Aynı şekilde evre uzayı, topolojik manifoltları ve kotanjant demetlerini kullanarak daha derinlemesine tanımlanabilir.
En Küçük Eylem İlkesi
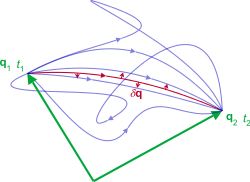
Hamilton formülü daha geneldir çünkü zamanla değişen enerjiye izin verir ve sabit eyleme sahip bir yol olması için takip edilen yolu tanımlar. Bu en küçük eylem ilkesi olarak bilinir:

Başlangıç t1 ve bitişit2 sabit tutarak. Eylem terimi çeşitli anlamlara gelir. Bu tanım sadece bir tanesidir ve özellikle Lagrangian sisteminin integraline cevap verir. Yol ya da yörünge terimi, sistemin zaman değişimini konfigürasyon uzayı aracılığyla , i.e. q(t) olan yol olarak tanır yani ’deki yolun planını çizer. Eylemin en az olduğu yol sistem tarafından alınmış yoldur.

Bu ilkeden yola çıkarak, klasik mekanikteki bütün hareket denklemleri çıkarılabilir. Bu yaklaşımların genellemeleri, quantum mekaniğinin integral formülleme yolunun altını çizer ve genel izafiyetteki jeodeziği hesaplamak için kullanılır.
Lagrange İşlevi ve Hamilton İşlevlerinin Özellikleri
Aşağıdakiler Lagrangian ve Hamiltonian işlevlerinin arasındaki birbirleriyle örtüşen özellikleridir.
- Her bağımsızlık derecesi için olan bütün başlı başına genelleştirilmiş koordinatlar qi(t), süratler q̇i(t) ve momentumlar pi(t) karşılıklı bağımsızlardır. Kapalı olmayan zaman-bağımlı fonksiyon; basitçe q(t) ve p(t) aracılığıyla parametre olarak değil, ( ki bu da kapalı olmayan zaman-bağımsız anlamına gelirdi) zamanı t q(t) ve p(t) nin yanında bir çeşit olarak içerir.
- Herhangi bir q ve t fonksiyonunun toplam zaman türevi ile toplanması durumunda, Lagrangian sabit kalır. Yani:

- bu yüzden her bir Lagrangian L ve L' bire bir aynı hareketi tanımlar.
- Benzer olarak, herhangi q , p ve t fonksiyonunun kısmi zaman türevi ile toplanması durumunda, Hamiltonian da sabit kalır. Yani:

- (K bu durumda sıklıkla kullanılan bir işarettir.) Bu özellik, kanonik ( kabul edilmiş, standart) dönüşümlerde kullanılır.
- Eğer Lagrangian bazı genelleştirilmiş koordinatlarının bağımsızı ise, bu koordinatlarla birleşmiş genelleştirilmiş momentumlar hareketin sabitleridir yani korunumludurlar. Bundan hemen Lagrange denklemleri sonucu çıkar:

- Bu tür koordinatlar yok sayılabilir ignorable ya da devirseldir. Bu gösterir ki Hamiltonian aynı zamanda tıpkı genelleştirilmiş koordinatlardaki gibi devirseldir.
- Eğer Lagrangian zaman-bağımsız ise, Hamiltonian da zaman bağımsızdır. Yani ikisi de zamanda değişmezler.
- Eğer kinetik enerji genelleştirilmiş hızların homojen bir fonksiyonu ise ( ikinci dereceden) ve Lagrangian açıkça zaman bağımsızsa:

- λ sabit olmak üzere,Hamiltonian toplam korunmuş enerji olur, sistemin toplam kinetik ve potansiyel enerjisine eşit olur:

- Bu, doğrudan onu alan quantum operatörlerini ekleyen Schrödinger denkleminin temelidir.
Hamilton-Jacobi Mekaniği
- Kanonik Dönüşümler
Hamiltonian değişmezliği;( p, q, ve t raslantısal fonksiyonunun kısmi bölümsel zaman türevinin eklenmesiyle) bir grup q koordinatlarının ve p momentumlarının, yeni bir grup Q = Q(q, p, t) ve P = P(q, p, t) ye dönüştürür. Bu dört şekilde olur:

Öyle ki P ve Q üzerindeki sınırlandırmayla, dönüşmüş Hamiltonian sistemi:

Yukarıdaki dönüşümler kanonik dönüşümler olarak adlandırılır, her bir Gn fonksiyonu "n cinsinden" ya da "n tipi" üreten fonksiyon olarak adlandırılır. Momentumların ve koordinatların dönüşümleri, Hamiltonian denklemleri için verilen problemi çözmede sadeleştirmeye izin verebilir.
- Poisson Parantezi
Q ve P seçimleri tamamen raslantısaldır fakat her seçim kanonik dönüşüme sebep olmaz. Poisson parantezini hesaplamak, bir q → Q ve p → Pdönüşümünün kanonik olup olmadığını kontrol etmek için olan basit bir testir.

ve eğer birim

bütün i = 1, 2,...N için ise dönüşüm kanoniktir aksi takdirde kanonik değildir.
Bütün dinamik değişkenler, r pozisyonundan, p momentumundan, t zamanından ve A = A(q, p, t) nin bir fonksiyonu olarak yazılanlardan türer. A nın toplam türevini hesaplamak ve sonuçlarda Hamilton denkleminin yerine kullanmak A nın evrimine sebep olur.

A daki bu denklem, Heissenberg betimlemesindeki hareket denklemiyle yakından alakalıdır ki bu denklemde klasik dinamik değişkenler (^) ile belirtilen quantum operatörlerine dönüşür ve Poisson parantezi, Dirackanonikkuvantumlaması aracılığıyla, operatör komütatörleri tarafından yer değiştirilir.
![{\displaystyle \{Q_{i},P_{i}\}\rightarrow {\frac {1}{i\hbar }}[{\hat {Q}}_{i},{\hat {P}}_{i}]\,.}](../I/m/854f5d035c6eebea7adad8823cef33b20a762ca8.svg)
- Hamilton-Jacobi denklemi
Kanonik olarak dönüştürülmüş Hamiltonian K = 0 olarak ayarlandığında, ikinci tip üretici fonsiyon Hamilton’un temel fonksiyonu (ayrıca ) ile gelişigüzel sabit ( keyfi, belirsiz sabit) C toplamına eşittir.


Genelleştirilmiş momentumlar,

ya dönüşür ve P sabittir. Sonrasında da Hamilton-Jacobi denklemi ( HJE ) ikinci tip kanonik dönüşümlerden türetilebilir.

H nin olduğu kısım öncesinde de olduğu gibi Hamiltonian’dır.

Bir diğer ilgili fonksiyon, zaman-bağımsız Hamiltonian H için olan toplumsal ayırma değişkenleri tarafından, HJE’yi çözmek için kullanılan Hamilton’ın karakteristik fonksiyonudur .

Hamilton-Jacobi denklemlerinin çözümleme çalışmaları haliyle simplektik manifold ve simplektik topoloji çalışmasına yol açmıştır. Bu formüllemede, Hamilton-Jacobi denklemlerinin çözümlemeleri, Hamiltonian vektör alanlarının integral eğrileridir.
Klasik Alan Kuramı İçin Genişletmeler
- Lagrangian alan teorisi
Genelleştirilmiş koordinatlar, skaler alanlarla φ(r, t) yer değiştirerek ve Lagrangian yoğunluğunu tanımlayarak ( birim hacime düşen Lagrangian), ki Lagrangian bunun hacim integralidir:


∂μ 4-gradient Euler-Lagrange denklemleri alanlara genişletilebilir (toplam konvansiyonun kullanıldığı yerlerde):
![{\displaystyle \partial _{\mu }\left[{\frac {\partial {\mathcal {L}}}{\partial [\partial _{\mu }\varphi ]}}\right]={\frac {\partial {\mathcal {L}}}{\partial \varphi }}\,,}](../I/m/1a4e0c942dd75c6467cc012a932dd39f42d1df15.svg)
Bu skaler alan formüllemesi, vektör alanlarına, tensor alanlarına ve hatta spinor alanlarına genişletilebilir. Aslen klasik alanlar için geliştirilmiş yukarıdaki formülleme, klasikteki bütün fiziksel alanlar, quantum ve göreceli durumlar için ( Newton yerçekimi, klasik elektromanyetizm, genel izafiyet ve quantum alan teorisi gibi ) kabul edilebilirdir. Bu, doğru olan denklemini geliştirmek için doğru Lagrangian yoğunluğuna karar verme meselesidir.
- Hamiltonian alan teorisi
φ(r, t) alanına bağlı olan yöndeş momentum alan hacmi şudur:

Hamiltonian yoğunluğu (birim hacme düşen Hamiltonian) aynı şu şekildedir:


ve benzer şekilde tamamlar:

Routhian Mekaniği
Yukarıda bahsedilen halkalı koordinatları kaldırmak için Routhian tanımlanabilir:

Ki bu Lagrangian gibidir ancak sadece N - 1 bağımsızlık derecesi ile birlikte. Routhian yoğunluğu şunu tamamlar:

Ayrıca şunu da tamamlar :

Eşbakışım (simetri), korunum ve Noether kuramı
- Klasik mekan ve zamanda simetri dönüşümleri
Her dönüşüm bir operatör tarafından tanımlanabilir. (yani r pozisyonu ya da p momentumu değişkenleri üzerindeki fonkiyon temsili onları değiştirmek içindir.) Aşağıdakiler, operatörlerin r ya da p yi yani simetrileri değiştirmediği durumlardır.
Transformation Operator Position Momentum Translational symmetry Time translations Rotational invariance Galilean transformations Parity T-symmetry


















R(n̂, θ) olduğu yer, vektör birimi n̂ ve θ açısı tarafından tanımlanan bir eksen hakkındaki rotasyon matriksidir.
Noether teoremi şunu belirtir: bir hareketin zincirleme simetri dönüşümü, korunum yasasına cevap verir yani hareket ( ve nitekim Lagrangian ) bir s parametresi tarafından ifade edilen bir dönüşüm durumunda değişmez.
![{\displaystyle L[q(s,t),{\dot {q}}(s,t)]=L[q(t),{\dot {q}}(t)]}](../I/m/8a306c98f32aae1bd3da6bef5e96de807c6343bb.svg)
Lagrangian aynı s bağımsız hareketini tanımlar, ki bu uzunluk, rotasyon açısı ya da zaman olabilir. q ya karşılık gelen momentum korunur.
Kaynakça
Daha fazla
- Action (physics)
- Applied mechanics
- Classical mechanics
- Dynamics
- Hamilton–Jacobi equation
- Hamilton's principle
- Kinematics
- Kinetics (physics)
- Non-autonomous mechanics
Şablon:Physics-footer