Uzay mekiği






Uzay mekikleri ilk defa 1981'de NASA tarafından kullanılmaya başlanan uzay araçlarıdır. Amacı uzaya gönderilen aracın tekrar tekrar kullanılarak maliyetini azaltmaktı. Zira ABD Uzay Mekiği 120'den fazla uçuş yapmıştır. Fakat daha sonra yapılan araştırmalar tekrar kullanılabilir uzay mekiklerinin eski tip roketlere göre daha maliyetli olduğunu gösterdi. Bunun sebebi uzay mekiklerinin kullanıldıktan sonra uzun ve pahalı bakımlara ihtiyaç duymasıydı.
ABD uzay mekikleri
- Columbia Uzay Mekiği (1981 - 2003 - kazada tahrip oldu)
- Challenger Uzay Mekiği (1983 - 1986 - kazada tahrip oldu)
- Discovery Uzay Mekiği (1984-2010)
- Atlantis Uzay Mekiği (1985-2011)
- Endeavour Uzay Mekiği (1991-2011)
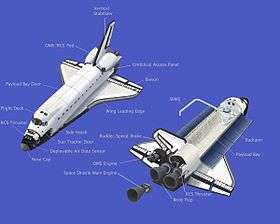
Uzay mekiğinin bölümleri
Katı yakıt iticiler (Solid Rocket Booster's SRB)
Bunlar yandaki resimde uzay mekiğinin iki yanında bulunan roketlerdir. Kalkışta kullanılırlar; çünkü kalkış sırasında ilk hareketin verilmesi için büyük bir itme gerekir ve bu da katı yakıtlı roketlerle yapılabilir. Roketler bırakıldıktan sonra baş kısımlarında bulunan paraşüt açılır ve yavaşça okyanusa düşerler. Okyanustan alınıp tekrar kullanılırlar. Üretildikleri yerden kara yoluyla Kennedy Hava Üssü'ne taşındıkları için parça şeklinde taşınırlar. İlk başta yedi olan parça sayısı fabrikada kaynak yapılmasıyla dörde düşer. Daha sonra üsse taşınan bu dört parça Lockheed firması tarafından birbirine monte edilir, kaynak gibi bir eritme işlemi yapılmaz.
Yakıt Sarnıcı (External Tank ET)
Bu da resimde kırmızı olarak görünen objedir. İçerisinde mekiğin belli bir hız ve yüksekliğe ulaşıncaya kadar kullandığı hidrojen bulunur. Mekik, atmosferden çıkıncaya ve yörüngeye oturma hızına gelinceye kadar kendi içindeki yakıtı kullanmaz. Hidrojen tankı roketler gibi tekrar kullanılmaz. Düştüğü yerde parçalanır.
Yörüngeci (orbiter)
Uzay mekiğinin kullanılma amacı sadece uydu taşımak değildir. Aynı zamanda içerisinde bulunan laboratuvarlarda yerçekimsiz ortamda deneyler yapılır. Ayrıca mekiklerin sıradan roketlere üstünlüğü uzaktan kumandalı kol ile kargosunda bulunan bir yükü istediği yüksekliğe bırakabilmesidir.
Ana Motorlar ana motorun görevleri Uzay mekiklerinin 3 adet ana motoru vardır. Bunlar dış yakıt tankından gelen hidrojeni oksijen ile yakmaktadır ve uzay mekiğinin atmosferden çıkmasına yardımcı olmaktadır. Bugüne kadar tasarlanan en verimli motorlardır. Bir ana motorun ömrü 7 saattir ve her bir görevde yaklaşık 8 dakika kullanılırlar.
Mekiğin bölümleri
Ön kontrol iticileri
Mekiği yörüngeye oturtmak için geri gitmesi gerektiğinde kullanılırlar.
Yıldız takipçisi (yıldızlara göre yön)
Yıldızların yeri ve aralarındaki açı değişimine göre mekiğin uzaydaki yerini kesin bir şekilde belirler. Bir nevi pusuladır.
Uzaktan kumandalı kol
Mekiğin kargosunda bulunan uyduyu gereken yörüngeye taşıyan mekanik koldur.
Elevonlar (kanat parçaları)
Mekiğin Dünya'ya dönüşü sırasında yukarı aşağı hareketini sağlayan kanat parçalarıdır.
Dümen
Mekiğin Dünya'ya dönüşü sırasında sağ sol hareketini sağlayan parçadır.
Gövde flapları
Mekiğin Dünya'ya dönüşü sırasında gerektiğinde yavaşlamasını sağlayan (aerodinamik fren) parçadır.
Mekik uzaydaki görevini bitirdikten sonra normal bir uçak gibi yere iner. İndiği yerden büyük Boeing jetleriyle alınır ve tekrar fırlatma üssüne getirilir. Burada da büyük paletlerle fırlatma rampasına taşınır.
Son uçuş
ABD Uzay Mekikleri tasarımlarının hatalı olduğu ve güvenli olmadıkları gerekçesiyle eleştirilmiştir. Mekiklerde bir kaza durumunda personeli kurtaracak bir tahliye sistemi yoktur (bu sistem Soyuz, Apollo ve diğer insanlı uzayaraçlarında vardır). Hizmete alınan beş Uzay Mekiği'nden ikisi kazalar sonucunda yok olmuş ve personelleri hayatlarını kaybetmiştir. Bunun sonucunda Uzay Mekikleri, uzay tarihinin en riskli projesi halini almıştır. Bu nedenle yeni mekikler üretilmemekte olup, var olanlar 2012 yılından itibaren kullanımdan kaldırılmıştır.
Tipik uzay mekiği alt sistemleri
Yükseklik denetimi
Uzay gemisi kendini doğru yönlendirebilmek ve dış torklara ve kuvvetlere gerektiği gibi yanıt verebilmek için yükseklik denetimi sistemine ihtiyaç duyar. Yükseklik denetimi alt sistemi, alıcılar ve harekete geçiriciler (aktüatör) ile birlikte denetim algoritmalarından oluşur.