Curiosity (keşif aracı)
| Curiosity kâşif robotu | |
|---|---|
 | |
| Organizasyon | NASA |
| Başlıca yükleniciler | Boeing, Lockheed Martin, MacDonald Dettwiler |
| Görev türü | Keşif |
| Fırlatma tarihi | 26 Kasım 2011 |
| Taşıyıcı roket | Atlas V 541 |
| Fırlatma yeri | Cape Canaveral |
| Görev süresi | 686 Mars günü (690 Dünya günü) |
| COSPAR kimliği | 2011-070A |
| Web sayfası | http://mars.jpl.nasa.gov/msl/ |
| Kütle | 900 kg |
| Güç | Radyoizotop termoelektrik üreteci |
| Gezegen İniş | |
| Gezegen | Mars |
| Gezegene iniş | 6 Ağustos 2012 |
| Gezegen koordinatı |
Gale Krateri, 4°36′0″G 137°12′0″D / 4.6°G 137.2°D |
Curiosity, NASA'nın Mars Bilim Laboratuvarı misyonunun bir parçası olarak Mars'ta Gale kraterinde keşifte bulunan otomobil büyüklüğündeki kâşif robotu.
Curiosity kâşif robotu, Mars Bilim Laboratuvarı'nın içinde 26 Kasım 2011 saat 10:02'de (Doğu Zaman Dilimi) Cape Canaveral Uzay İstasyonu'ndan fırlatıldı ve 6 Ağustos 2012 saat 05:17'de (UTC) başarılı bir şekilde Mars'taki Gale kraterinde Aeolis Palus bölgesine iniş yaptı.[1] Kâşifin iniş yeri 563.000.000 km'lik yolculukla hedefleyip inmek istediği Bradbury iniş bölgesinden 2.4 km ötede gerçekleşti.
Kâşifin hedefleri Mars iklimini, jeolojisini incelemek ve Mars'ta daha önce yaşam olup olmadığını araştırmak ve su barınabilirliği ve dünyasal yerleşim ile ileri zamanlarda insansı keşiflerin mümkün olup olmadığını araştırmaktır.[2]
Curiosity kelimesi türkçe "merak" anlamına gelmektedir.
Hedef ve amaçlar

Mars Keşif Programı çerçevesinde belirtildiği gibi, Mars Bilim Laboratuvarı misyonunun temel bilimsel hedefleri Mars'ta daha önce yaşam olup olmadığını araştırmak, suyun rolünü incelemek ve Mars'ın iklimi ile jeolojisini etüt etmektir. Bu misyon aynı zamanda Mars'ın gelecekte insanlar tarafından keşfine de hazırlık olacaktır.
Bu hedeflere ulaşmaya çalışırken, Curiosity kâşif robotun sekiz temel bilimsel amacı vardır;
- Organik bileşiklerin doğasını ve miktarını saptamak
- Karbon, hidrojen, nitrojen, oksijen, fosfor ve sülfür gibi yaşam için gerekli kimyasal yapı taşlarının miktarını belirlemek
- Biyolojik süreçleri temsil edebilecek özellikleri tanımlamak
- Mars yüzeyinin kimyasal, izotopik ve mineralojik bileşimini incelemek
- Kaya ve toprakların oluşum ve değişim süreçlerini incelemek
- Mars atmosferinin 4 milyar yıllık uzun evrim sürecini araştırmak
- Su ve karbondioksidin şu anki durumunu, dağılımını ve dönüşümünü incelemek
- Galaktik radyasyon ve kozmik radyasyon da dahil yüzey radyasyonunu karakterize etmek
Özellikler
Curiosity kâşif robotu ana misyonu kendisini Mars'a ulaştırmak olan 3893 kiloluk Mars Bilim Laboratuvarı'nın %23'ünü oluşturur. Mars Bilim Laboratuvarı'nın geri kalan kısmı bu taşıma görevi esnasında atılmıştır.
- Boyutlar: Curiosity kâşif robotu 80 kg bilimsel alet dahil toplam 899 kg ağırlığındadır. Robot 2.9 metre boyunda, 2.2 metre genişliğinde ve 2.2 metre yüksekliğindedir.
- Güç kaynağı: Curiosity 1976 yılında başarılı bir şekilde Mars'ta keşif yapan Viking 1 ve Viking 2 robotları gibi güç kaynağı olarak Radyoizotop termoelektrik üreteci kullanır.
Radyoizotop güç sistemleri plütonyumun parçalanamayan izotopu olan plütonyum-238'in doğal bozunumundan elektrik üreten jeneratörlerdir. Isı bu izotopun doğal bozunumundan elde edilir ve termokupleler vasıtasıyla elektriğe dönüştürülür ve böylece her mevsim gece ve gündüz güç elde edilmiş olur. Ayrıca artık ısı borular aracılığıyla sistemi ısıtmak için kullanılabilir. Curiosity'nin Radyoizotop termoelektrik üretecinin yakıtı 4.8 kg'lık plütonyum-238 A.B.D Enerji Bakanlığı'ndan temin edilmiştir. Bu plütonyum her biri yaklaşık bir lokum boyutunda (≈20 cm3) 32 küp halinde paketlenmiştir.
Curiosity'nin güç üreteci Boeing ve Idaho Ulusal Laboratuvarı tarafından geliştirilen en son model çok misyonlu radyoizotop termoelektrik üretecidir. Klasik radyoizotop termoelektrik üretecine ek olarak daha esnek ve sağlam gelişim süreci sunar, ve yaklaşık 2000 Watt termal güçten 125 Watt elektrik üretebilir. Çok misyonlu radyoizotop termoelektrik üreteci plütonyum yakıtının bozunmasıyla zamanla daha az güç üretmeye başlar: minimum yaşam süreci olan 14 yılda üretilen elektrik 100 Watt'a kadar düşer. Bu güç kaynağı günde 9 MJ elektrik üretir ki bu daha önce Mars'a gönderilen ve enerjisini solar paneller ile güneşten alan robotların ürettiği günlük 2.1 MJ elektikten daha fazladır. Çok misyonlu radyoizotop termoelektrik üretecinin ürettiği elektrik iki adet şarj edilebilir lityum-iyon pilini şarj eder. Her bir pilin yaklaşık 42 amper-saat kapasitesi vardır.
- Isı red sistemi: Curiosity'nin inişe geçebileceği muhtemel alanlarda sıcaklık -127 ilâ +30 *C arasında olabilir. Bu yüzden ısı red sistemi, MBL'nın bünyesinde bulunan ve hassas sistemleri optimal sıcaklıkta tutmaya yarayan, 60 m uzunluğunda olup içinden sıvı pompalanan bir boru sistemine sâhiptir.[3] Dâhilî parçaları ısıtmak için kullanılan bir başka metot da aracın içinde diğer üniteler ve ÇYRTJ biriminden ortaya çıkan artık ısıyı kullanmaktır. IRS'nin bir başka özelliği de gerektiğinde üniteleri soğutmaktır.[3]
- Bilgisayarlar: Kâşif İşlem Birimi adı verilen iki özdeş yerleşik kâşif bilgisayarı mevcuttur. Bilgisayarların önemli bir kapanma sebebini önlemek için başka uzay araçlarında da olduğu gibi yapımında uzayın aşırı ışımasına dayanıklı bellek kullanılmıştır. Her bilgisayarın belleği 256 KB EEPROM, 256 MB DRAM ve 2 GB flash memory vardır.[4] 3 MB EEPROM, 128 MB DRAM ve 256 MB flash belleği olan Mars Exploration Rover'lerden daha güçlüdür.[5]
- KİB bilgisayarları, Mars Exploration Rover'lerin kullandığı RAD6000 merkezî işlem biriminin gelişmişi RAD750 MİB'yi (CPU) kullanmaktadır.[6][7] RAD750 MİB'si 400 milyon işlem/s'ye kadar hesaplayabilirken RAD6000 MİB'si ancak 35 MİPS'e erişir.[8][9] İki yerleşik bilgisayardan biri yedekte olup ana bilgisayar arızalandığında kontrolü devralır.[4]
- Kâşifin Dâhilî Ölçüm Birimi (DÖB; Inertial Measurement Unit (IMU)) ile sağlanan üç eksen konum bilgisi, kâşif robotun navigasyonunda kullanılır.[4] KR'un bilgisayarları, dâhilî sıcaklığı ayarlamak gibi işlemlerle kendini devamlı denetleyerek KR'un kullanılmaya hazır durumda kalmasını sağlar.[4] Resim çekmek, hareket etmek ve âletleri kullanmak gibi işlemler, uçuş ekibince ona yollanan bir komut dizisi şeklinde uygulamaya konur.[4]
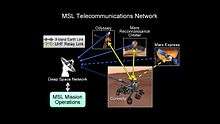
- Haberleşme: Curiosity'nin iki haberleşme imkânı vardır: Dünya ile doğrudan haberleşebilen bir X bandı verici-alıcısı ve Mars etrafında dönen uzay araçlarıyla (orbiter) haberleşmek için Mars UHF Electra-Lite software-tanımlı radyo. Yörüngedeki uzay araçlarıyla haberleşme, yörünge araçlarının daha güçlü ve büyük antenlerinden dolayı kâşifin muhtemel ana haberleşme yolu olarak görülmektedir.[10]
- İnişe geçerken telemetri Mars Odyssey, Mars Reconnaissance Orbiter ve ESA'nın Mars Express uydularınca izlenecek. Odyssey, UHF frekanslarında Dünya'ya gerçek zamanlı telemetri yapabilecek kapasitededir ve bu yayın 13:46 dakika sürer.[11][12]
- Hareketlilik sistemleri: (mobility systems) Önceki kâşif robotlarında olduğu gibi (Mars Exploration Rover’leri, Mars Pathfinder) Curiosity’nin altı tekerleği, bir kamyon-askı sistemiyle araca bağlanmıştır. Diğer kâşif robotların hilâfına amortisör sistemi, bu sefer inişe geçme takımı olarak da kullanıldı.[13] Curiosity'nin tekerlerleri, önceden Mars’a inen iki robot çeşitinden önemli ölçüde daha büyüktür. Her tekerleğin sırtı (profili) trıksiyonu sağlayacak şekildedir. Ancak Mars’ın kumla yüzeyinde izler bırakırlar. Bu izler, kâşif robotun kameraları tarafından gidilmiş yolun uzunluğunu tahmin etmede kullanılır. İz, "JPL" için Mors kodudur (•--- •--• •-••).[14]
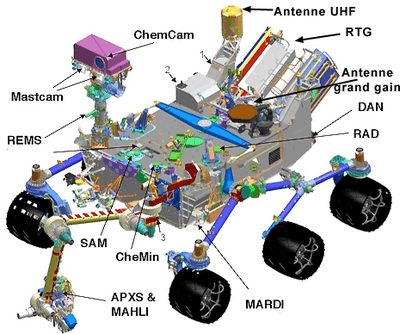
Aletler
Genel numune analizi stratejisi yüksek çözünürlüklü kameralarla ilgi alanına giren nesneleri tespit etme amaçlıdır. Eğer belli bir yüzey ilgi alanına giriyorsa, Curiosity o yüzeyin küçük bir kısmını kızılötesi lazer yardımıyla buharlaştırabilir ve o kaya ya da toprağın yapısını inceleyebilir. Eğer incelediği kısım ilgi çekici ise robot uzun kolunu kullanarak bir mikroskop ve X-ray spektrometre yardımıyla o kısma daha yakından bakabilir. Eğer bilim insanları daha ileri bir analiz isterlerse, Curiosity büyük kaya parçalarını delebilir ve toz haline getirilmiş numuneleri robotun içindeki SAM adı verilen analiz laboratuvarına gönderebilir. Bu laboratuvar 74 kupa numune kapasitesine sahiptir.
Mast Kamera (MastCam)
MastCam sistemi iki kamerayla çoklu spektrum ve gerçek-renk görüntüleme hizmeti sunar. Kameralar 1600×1200 piksel çözünürlükte gerçek-renk görüntü yakalayabilir ve 720p video kaydedebilir.
Bu iki MastCam kameradan biri 34mm odak uzaklığına sahip ve 15 derece görüş alanı olan orta açılı kameradır. Diğer kamera ise 100mm odak uzaklıklı, 5.1 derece görüş alanı olan dar açılı kameradır. Her iki kamera 5500'den fazla ham görüntü saklayabilecekleri 8GB belleğe sahiptir ve gerçek zamanlı kayıpsız veri sıkıştırma yapabilirler. Kameraların 2.1 metreden sonsuza otomatik odaklama yapabilme özellikleri var. Sabit RGGB Bayer model filtresine ek olarak, her bir kameranın sekiz-pozisyonlu filtre tekerleği vardır. Bayer filtresi görülebilir ışık miktarını azaltırken, diğer üç renk genelde saydam ve kızılötesi gözlemlerde minimum etkiye sahiptir.
Kimya ve kamera seti (ChemCam)
ChemCam robotun uzaktan algılama ekipmanlarının olduğu kısımdır ve adından da anlaşılacağı üzere ChemCam iki farklı ekipman içerir: lazer güdümlü analiz spektroskobu (LIBS) ve mikro görüntüleyici RMI teleskop. Spektroskobun görevi taş ve toprakların elementsel bileşimlerini ortaya çıkarmak, RMI teleskobun görevi ise bilim insanlarına taş ve topraktan alınmış yüksek çözünürlüklü görüntüler sunmak. Spektroskop bir taşı ya da toprağı 7 metre uzaklığa kadar hedefleyebilir, kızılötesi lazer yardımıyla küçük parçalara ayrıştırıp buharlaştırabilir ve buharlaştırılmış taştan dışarı çıkan ışık spektrumlarını gözlemleyebilir. ChemCam morötesi, kızılötesi ve görülebilir ışığın 6144 farklı dalga boyuna kadar kayıt yapabilme yeteneğine sahiptir. ChemCam mühendisleri günde yaklaşık bir düzine kaya parçasının bileşimini hesaplamayı amaçlıyor.
RMI teleskobu spektroskobun analiz ettiği numunelerin görüntülerini alacak. RMI teleskobu objeleri 10 metre uzaklığa kadar çözümleyebilir ve 20 cm görüş alanı vardır. ChemCam ekipmanı Los Alamos Ulusal Laboratuvarı ve Fransız CESR Laboratuvarı tarafından geliştirildi.
Seyir kameraları (Navcams)

Curiosity kâşif robotu tepe kısmına monte edilmiş iki çift siyah ve beyaz navigasyon kamerasına sahiptir. Kameraların 45 derece görüş alanı ve ışığı kullanarak stereoskopik üç boyutlu görüntü yakalama özelliği var. Bu kameralar ICER görüntü sıkıştırma formatını kullanır.
Kâşif Çevre İzleme İstasyonu (REMS)
Kâşif Çevre İzleme İstasyonu (REMS) Mars'taki nem, basınç, sıcaklık, rüzgar hızı ve mor ötesi radyasyonu ölçmek için gerekli ekipmanı içerir. Bu ekipman İspanya Eğitim Bakanlığı tarafından NASA'ya verilmiş içinde mor ötesi alıcı da içeren meteorolojik bir pakettir. Araştırma ekibi Madrid'teki astrobiyoloji merkezinden Javier Gómez-Elvira tarafından yönetilmekte ve Finlandiya Meteoroloji Enstitüsü de ortaklar arasında bulunmaktadır. Ekipmandaki tüm alıcılar üç unsurun etrafına yerleştirilmiştir: iki boru robotun tepesinde, mor ötesi alıcı (UVS) robotun sırtında ve Ekipman Kontrol Ünitesi (ICU) robotun içindedir. Kâşif Çevre İzleme İstasyonu'nun Mars'ın genel sirkülasyonu, mikro ölçekli hava sistemleri, yerel hidrolojik döngüsü, UV radyasyonun yok edici potansiyeli ve yeraltı yaşamı hakkında yeni ip uçları sunması hedefleniyor.
Riskten kaçınma kameraları (Hazcams)
Robotun Hazcams adı verilen dört çift siyah ve beyaz navigasyon kamerası var. Bunlardan ikisi önde, ikisi arka taraftadır. Bu kameralar robot hareket halindeyken olası risk ve tehlikelerden sakınmak için geliştirilmiştir. Kameralar stereoskopik 3-D görüntü yakalayabilmek için görünür ışığı kullanır. Kameralar 120 derece görüş alanına sahip ve bölgeyi robotun ön kısımından itibaren 3 metreye kadar haritalandırabilirler. Yakalanan görüntüler robottaki bir yazılım sayesinde analiz edilip robotun güvenli seçim yapmasına olanak sağlar.
Mars Lens Görüntüleyici (MAHLI)
Kısaca MAHLI adı verilen bu kamera kâşifin robotik koluna monter edilmiştir ve kaya ve toprağın mikroskobik görüntüsünü alabilir. MAHLI 1600×1200 piksel gerçek-renk görüntüler almakla birlikte piksel başına 14.5 mikrometre çözünürlüğe de çıkabilir. MAHLI'nin odak uzaklığı 18.3 mm ile 21.3 mm arasındadır ve 33.8-38.5 derece görüş alanı vardır. MAHLI karanlıkta da görüntüleme yapabilmek için beyaz ve mor ötesi LED aydınlatmasına sahiptir. MAHLI hem ham hem de gerçek zamanlı kayıpsız JPEG görüntü kaydedebilir.
Alfa Parçacık X-ray Tayfölçer (APXS)
Bu makine numuneleri alfa parçacıkları ile radyasyona tabii tutacak ve numunelerin bileşimini saptamak için X-ray ışınlarının spektrumunu haritalandıracak. Curiosity'deki bu ekipman Kanada Uzay Ajansı tarafından geliştirildi. Canadarm ve RADARSAT'ın geliştiricisi Kanadalı uzay şirketi MacDonald Dettwiler bu ekipmanın tasarımından sorumluydu. APXS ekibinde Guelph, New Brunswick, Western Ontario, NASA, California, San Diego ve Cornell üniversitelerinden bilim insanları var.
Kimya ve Mineralbilim (CheMin)
CheMin X-ray toz difraksiyon ve floresan işlevi gören kimya ve mineraloji ekipmanıdır. CheMin dört spektrometreden biridir. Mars'taki minerallerin çokluğunu ve miktarını belirleyecek. NASA Ames Araştırma Merkezi'nden David Blake ve Jet Propulsion Laboratuvarı tarafından geliştirildi. Robot kayaları delip topladığı toz numuneleri aracın üzerindeki bir tüpün içine boşaltacak. X-ray ışınları bu toz kütlesi üzerine tutulacak ve minerallerin kristal yapıları böylece analiz edilmiş olacak.
Mars'ta numune inceleme (SAM)
SAM ekipmanı hem atmosferden hem de kaya örneklerinden çıkan organikleri ve gazları analiz edecek. Ekipmanın içerisinde NASA Goddard Space Flight Center, Laboratoire Inter-Universitaire des Systèmes Atmosphériques (LISA) ve Honeybee Robotik tarafından geliştirilen aletler var. Ekipmandaki üç ana element şunlar: dört kutuplu kütle spektrometre (QMS), gaz kromatograf ve ayarlanabilir lazer spektrometre. Bu araçlar oksijen ve karbon izotoplarının karbondioksitteki oranını ve aynı zamanda Metan gazının atmosferdeki miktarını belirleyecek.
Radyasyon değerlendirme detektörü (RAD)
Radyasyon değerlendirme detektörü (RAD) 10 adet MBL ekipmanı içerisinde çalıştırılan ilk ekipman oldu. İlk görevi uçuş esnasında uzay gemisinin içindeki radyasyonu karakterize etmekti. Uzay gemisinin içinden böyle bir ölçüm daha önce hiç gerçekleştirilmemişti ve burada asıl hedef ileride olası bir insansı uçuş için yaşayabilme ve korunma yollarını belirlemekti. İkinci görevi ise Mars'a iniş yapar yapmaz yüzeydeki radyasyonu ölçmekti. NASA ve Alman Uzay Ajansı ortak yapımı olan RAD Southwest Research Enstitüsü ve geliştirildi Christian-Albrechts-Universität zu Kiel'de geliştirildi.
Nötronların Dinamik Aklığı (DAN)
Bu ekipman Mars yüzeyindeki hidrojen veya buz ve suyu tespit etmeye yarayan darbeli bir nötron kaynağı ve detektörüdür. Rus Uzay Ajansı tarafından geliştirilmiştir.
Mars İniş Görüntüleyici (MARDI)

Mars yüzeyine iniş sırasında MARDI 3.7 km'den yere ininceye kadar 1600×1200 piksel çözünürlükte, 1.3 mili-saniye pozlama ile iki dakika içerisinde fotoğraflar çekmiştir. MARDI 90 derece görüş alanı ve 4000'den fazla ham görüntü saklayabilecek 8GB kapasiteye sahiptir.
Robotik kol

Curiosity'nin 2.1 metre uzunlukta ve üzerinde beş farklı parça taşıyan ve etrafında 350 derece dönebilen uzun bir kolu vardır. Bu kol üç eklemden oluşur ve ileriye doğru uzanabilir. Bu robotik kol 30 kg ağırlığında ve yaklaşık 60 cm yarıçaptadır. X-ray spektrometre (APXS) ve Mars Lens Görüntüleyici (MAHLI) ekipmanları bu kolun üzerindedir. Kolun üzerindeki diğer ek parçalar darbeli matkap, fırça ve toz haline getirilmiş kaya ve taşlardan elde edilen numuneleri tüp içerisine koymaya yarayan edevatlardır.
Karşılaştırmalar

Curiosity'nin Mars'ta bilimsel ekipmanları taşımak için gelişmiş bir taşıma kapasitesi vardır. NASA'nın 1996'dan beri Mars'a gönderdiği dördüncü robottur. Önceki başarılı Mars robotları: Sojourner (2004), Spirit (2004-2010) ve Opportunity (2004-günümüz).
Curiosity 2.9 m boy, 2.7 m genişlik ve 2.2 m yüksekliği ile diğer Mars robotlarından daha büyüktür.
Beagle 2'nin lideri Curiosity'nin inişini izleyen teknisyen sayısını görünce oldukça heyecanlanmıştır çünkü kendisi sadece dört kişiye sahipti. Curiosity'nin maliyeti Beagle 2'nin maliyetinin 25 katı daha fazla oldu ve fakat Beagle 2 Mars Express tarafından salıverildikten sonra kayboldu.
Robotun keşif yaptığı Gale krateri yapı olarak Connecticut ve Rhode Island taraflarına benzerlik gösterdi.
Haberler ve kültürel etki
Mars yüzeyinden gönderilen ilk görüntüler 5 Ağustos 2012'de NASA TV tarafından çeşitli röportajlarla birlikte canlı yayınlandı. Canlı yayın esnasında aşırı yoğunluktan NASA'nın internet sitesi bir süreliğine çöktü. Yaklaşık 1000 kişi New York Times Square'de toplanıp Curiosity'nin inişini dev ekranda canlı izledi. İniş sorumlusu Bobak Ferdowsi Mohawk tarzı saçıyla internet mimi haline geldi ve Twitter'da 45.000 yeni takipçi kazandı.
13 Ağustos 2012'de ABD Başkanı Barack Obama Air Force'tan NASA'yı arayıp Curiosity ekibini tebrik etti "Sizler Amerikalıların yaratıcılık örneklerisiniz. Bu gerçekten büyük bir başarı." dedi.
Curiosity kaşif robotunun sosyal medya hesabı bulunmaktadır. 21 Ekim 2015 itibariyle 2 milyondan fazla takipçisi vardır.[15]
Fotoğraflar
 Curiosity'nin Mars'da Gale Kraterinden çektiği 4 ayrı fotoğrafın birleşimi sonucu çıkan gün batımı animasyonu.
Curiosity'nin Mars'da Gale Kraterinden çektiği 4 ayrı fotoğrafın birleşimi sonucu çıkan gün batımı animasyonu.
 Curiosity'nin Mars'tan çektiği dünya görüntüsü.
Curiosity'nin Mars'tan çektiği dünya görüntüsü.
Kaynakça
- ↑ NASA’da tarihi gün
- ↑ Curiosity için geri sayım
- 1 2 Susan Watanabe (2009-08-09). "Keeping it Cool (...or Warm!)". NASA/JPL. 21 Mayıs 2013 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20130521050832/http://www1.nasa.gov/mission_pages/mars/images/20081209_msl.html. Erişim tarihi: 2011-01-19.
- 1 2 3 4 5 "Mars Science Laboratory: Mission: Rover: Brains". NASA/JPL. 27 Kasım 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20151127210631/http://marsprogram.jpl.nasa.gov/msl/mission/rover/brains/. Erişim tarihi: March 27, 2009.
- ↑ Bajracharya, Max; Mark W. Maimone; Daniel Helmick (December 2008). "Autonomy for Mars rovers: past, present, and future". Computer 41 (12): 45. DOI:10.1109/MC.2008.9. ISSN 0018-9162.
- ↑ "BAE Systems Computers to Manage Data Processing and Command For Upcoming Satellite Missions". BAE Systems. June 17, 2008. http://www.baesystems.com/Newsroom/NewsReleases/autoGen_108517143749.html. Erişim tarihi: November 17, 2008.
- ↑ "E&ISNow — Media gets closer look at Manassas". BAE Systems. August 1, 2008. 24 Şubat 2009 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20090224205507/http://www.baesystems.com/BAEProd/groups/public/documents/bae_publication/bae_pdf_eis_2008-08-1.pdf. Erişim tarihi: November 17, 2008.
- ↑ "RAD750 radiation-hardened PowerPC microprocessor" (PDF). BAE Systems. July 1, 2008. http://www.baesystems.com/BAEProd/groups/public/@businesses/@eandis/documents/bae_publication/bae_pdf_eis_rad750_pwr_pc_mp.pdf. Erişim tarihi: 2009-09-07.
- ↑ "RAD6000 Space Computers" (PDF). BAE Systems. June 23, 2008. http://www.baesystems.com/BAEProd/groups/public/documents/bae_publication/bae_pdf_eis_sfrwre.pdf. Erişim tarihi: 2009-09-07.
- ↑ Andre Makovsky, Peter Ilott, Jim Taylor (2009). "Mars Science Laboratory Telecommunications System Design". JPL. 28 Şubat 2013 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20130228065724/http://descanso.jpl.nasa.gov:80/DPSummary/Descanso14_MSL_Telecom.pdf.
- ↑ Mars Earth distance in light minutes, Wolfram Alpha
- ↑ Relay sats provide ringside seat for Mars rover landing, William Harwood, CBS News
- ↑ "Next Mars Rover Sports a Set of New Wheels". NASA/JPL. 5 Temmuz 2014 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20140705201856/http://www.nasa.gov/mission_pages/msl/msl20100701.html.
- ↑ "New Mars Rover to Feature Morse Code". National Association for Amateur Radio. 19 Ekim 2015 tarihinde kaynağından arşivlendi. http://web.archive.org/web/20151019071031/http://www.arrl.org/news/new-mars-rover-to-feature-morse-code.
- ↑ https://twitter.com/marscuriosity
| ||||||||||||||